

 联系我们
联系我们

• 编码器系统正常,但是电源关闭后,机器人本体某个轴因外力所致,位置发生了变化。
• 编码器系统异常
编码器系统有异常的情况下,按下启动按钮机器人开始再现动作时,机器人会有意想不到的动作,非常危险。因此,为了确保安全性,发生***值允许范围异常报警后,只有确认第二原点位置的操作完成后,才能进行再现或试运行。确认的方法参考《第二原点位置确认》。
关于原点位置的分类和介绍,请参考往期文章《安川机器人-原点位置分类》《安川机器人-作业原点(HOME点)》。
使用一个示教器来控制多台机器人或工装轴时,每一台机器人或者工装轴都必须设定第二原点位置。
1. 选择主菜单中的【机器人】。
– 显示子菜单。
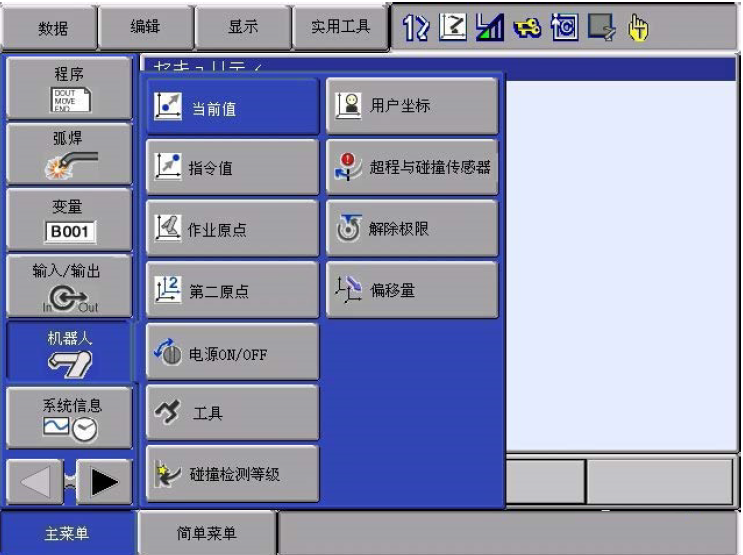
2. 选择【第二原点】。
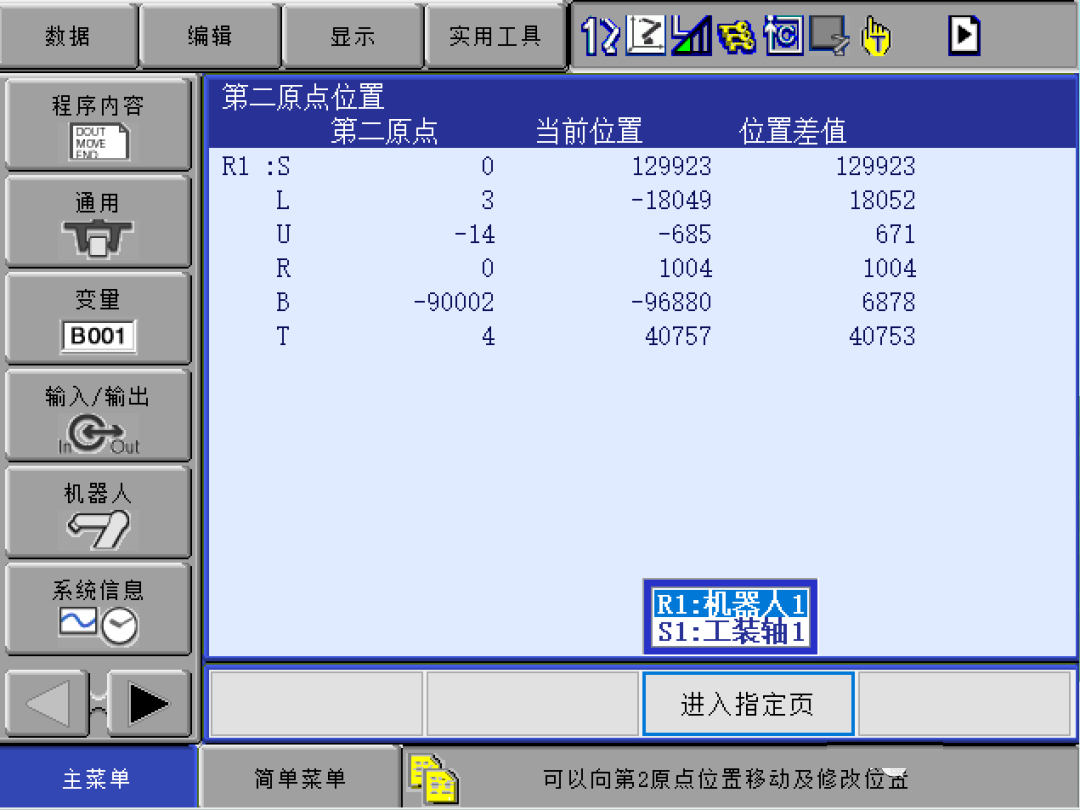
– 显示“ 第二原点位置画面” 的信息。
此时示教器画面下方会显示“ 可移动至第二原点” 的信息。

3. 选择【进入指定页】或者按下[ 翻页]。
– 有多个控制轴组时, 选择要设定第二原点的控制轴组。
4. 使用轴操作 键,将机器人移动到需要设置的第二原点位置。
– 当前位置表示机器人的实际所在位置
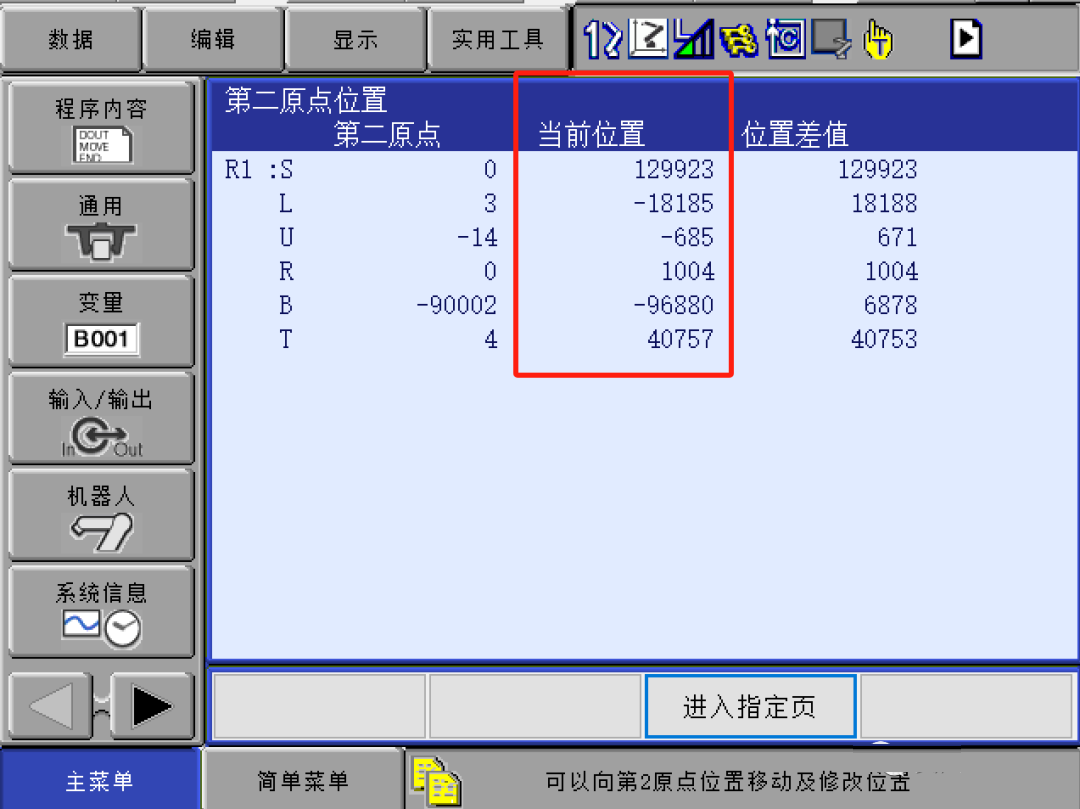
5. 按下[修改]、[回车]。
–更改第二原点位置完毕。
注意:
一般【第二原点位置】无需更改,仅在报警时有提示进行确认时,按照文章《第二原点位置确认》处理即可,且该位置和机器人在原点时的位置姿态相同。如果机器人安装位置比较紧凑,机器人移动不到出厂时的【第二原点位置】,此时可以设置一个机器人能够到达的任意位置作为以后的【第二原点位置】。
了解更多安川机器人
文章来源网络、如有侵权请联系删除
- 下一篇:安川机器人触摸屏无效该怎么解决
- 上一篇:安川机器人-焊接注意事项